


وصف لـ QGroundControl (Daily Test Build)
IMPORTANT: This version of QGroundControl is the daily testing version. It may not be as stable as the supported Stable version. It has all the latest features which are being added daily by the QGroundControl development team. This version should be sued with caution.
QGroundControl provides full flight control and configuration for ArduPilot or PX4 Pro powered vehicles. The goal for QGroundControl is improved ease of use for new users as well as high end feature support for experienced users.
QGroundControl features:
- Full configuration support for vehicles running PX4 Pro and ArduPilot (ArduCopter, ArduPlane, ArduRover, ArduSub ) firmware
- Mission planning for autonomous flight
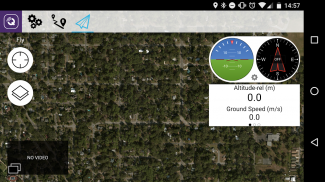
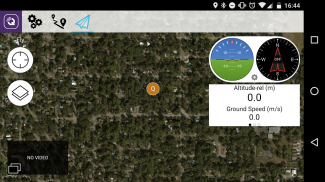
- Flight map display showing vehicle position, flight track, waypoints and vehicle instruments
- Video streaming with instrument display overlays
- Flight support for any MAVLink capable vehicle
QGroundControl is also available for Windows, MacOS, Linux and iOS.
Release Notes
QGroundControl Official Site
Documentation
Support
هام: هذا الإصدار من QGroundControl هو نسخة الاختبار اليومية. قد لا يكون مستقرًا مثل الإصدار المستقر المدعوم. يحتوي على أحدث الميزات التي يتم إضافتها يوميًا بواسطة فريق تطوير QGroundControl. يجب رفع دعوى ضد هذا الإصدار بحذر.
يوفر QGroundControl التحكم الكامل في الرحلة والتكوين للمركبات التي تعمل بنظام ArduPilot أو PX4 Pro الهدف من QGroundControl هو تحسين سهولة الاستخدام للمستخدمين الجدد بالإضافة إلى دعم الميزة المتطورة للمستخدمين ذوي الخبرة.
ميزات QGroundControl:
- دعم التكوين الكامل للسيارات التي تشغل PX4 Pro و ArduPilot (ArduCopter ، ArduPlane ، ArduRover ، ArduSub)
- مهمة التخطيط لرحلة مستقلة
- عرض خريطة الطيران تظهر موقف السيارة ، ومسار الرحلة ، ونقاط الطرق وأدوات السيارة
- دفق الفيديو مع تراكب عرض الصك
- دعم الطيران لأي مركبة قادرة على MAVLink
QGroundControl متاح أيضًا لنظام التشغيل Windows و MacOS و Linux و iOS.
ملاحظات الإصدار
موقع QGroundControl الرسمي
الوثائق
الدعم
QGroundControl (Daily Test Build) - إصدار 4.1.0-8-g246d5742b
(18-01-2021)QGroundControl (Daily Test Build) - معلومات APK
نُسخة APK: 4.1.0-8-g246d5742bالحزمة: org.mavlink.qgroundcontrolbetaتطبيقات من الفئة نفسها
قد يعجبك أيضًا...






